Part I: Convective clouds
Author: Thorsten Renk
The screenshots shown in the following use shaders, textures and scenery which are for various reasons (incompatible license, too recent development,…) not part of the official Flightgear 2.6 release. However, these are available for download and every feature works with Flightgear 2.6. The following packages need to be installed in addition to get to see the same: lightfield shader package v1.1, Juneau custom scenery, and textures from regional textures v0.1.
An integrated weather system
Without a doubt, clouds, haze and fog are the most easily noticed features of weather in a flight simulation, followed by winds. Advanced Weather v1.4 is however more than a tool to draw clouds and set wind parameters – it is a system with a (limited) understanding what the weather which it currently tries to render is, and it aims to simulate features of atmospheric physics.
This means that different weather phenomena tie together – winds and terrain influence the way cloud formation is taking place, cloud formation and the formation of thermal updrafts is connected, and weather is always understood as part of a large-scale weather pattern involving high and low pressure systems.
At the same time, clouds and atmospheric haze also influence the atmospheric light (and now also the scenery) in an essential way – strong fogging changes the color of sunrises to a blue-grey, wave patterns on the ocean follow the wind strength and direction and rain causes visibly wet runways. Let us have a look at how this works in fair weather.
The formation of convective clouds
Fair weather is typically characterized by convective cloud development: The sun heats the terrain and the air layer just above, thus warm air rises up in ‘bubbles’ and forms thermals, as the air rises, it expands and cools and eventually the moisture condenses into droplets, forming the characteristic, cauliflower-shaped Cumulus clouds. Cumulus clouds are the most common example of clouds formed by pronounced vertical motion of air.
As every glider pilot looking for thermals has to learn quickly, the formation of convective clouds depends on many different factors. The terrain type is crucial – while rock or concrete surfaces heat well in sunshine and may easily lead to well-developed thermals and cloud formation, open water or ice is much less likely to heat up in sunshine and seed Cumulus formation. High points in the terrain mark the spots where the bubbles of warm air are most likely to lift off the ground. Another important factor is the time of the day: The sun needs sufficient time to heat the terrain, therefore Cumulus formation is densest around noon, but the thermal updrafts are strongest in the afternoon, and while pronounced Cumulus clouds are unlikely to form in the morning, the thermal energy accumulated over a day may still give rise to well-developed clouds in the evening.
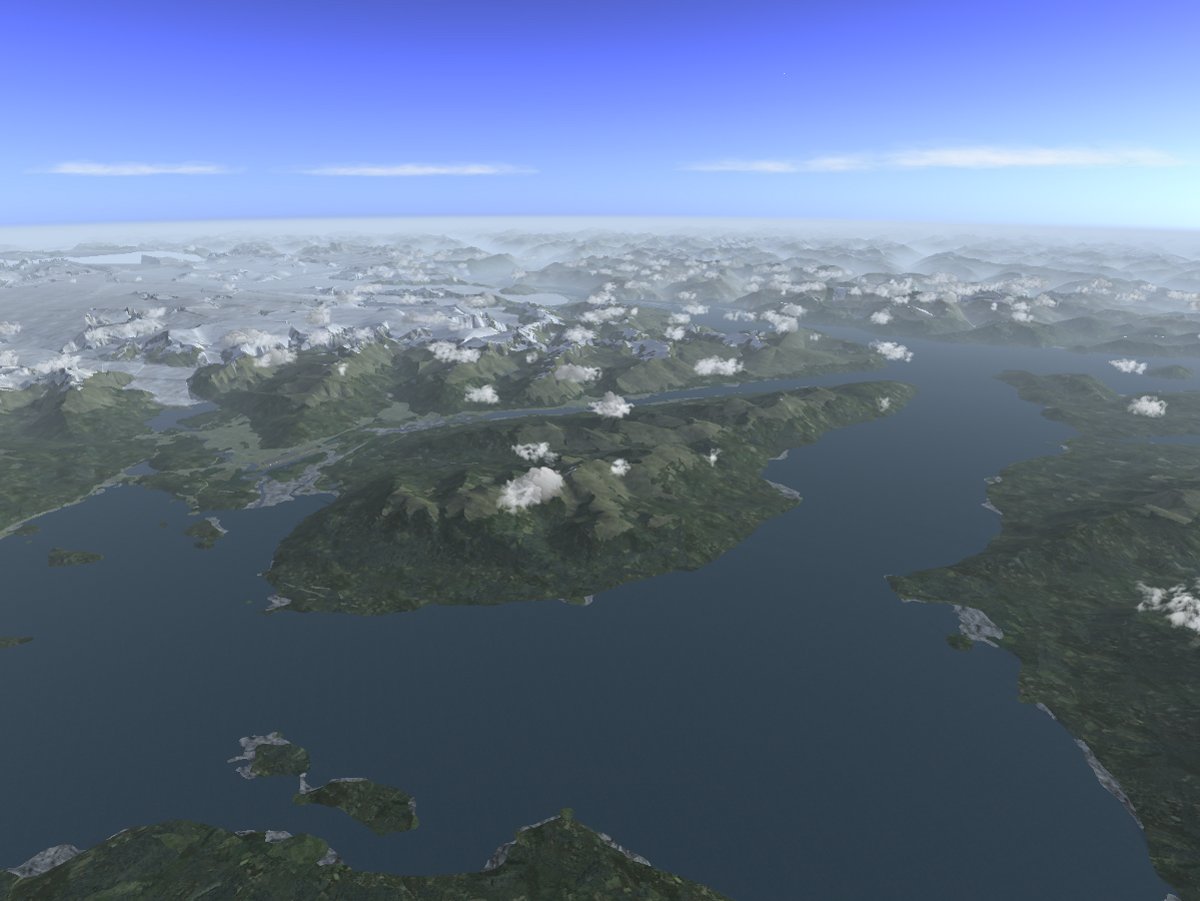
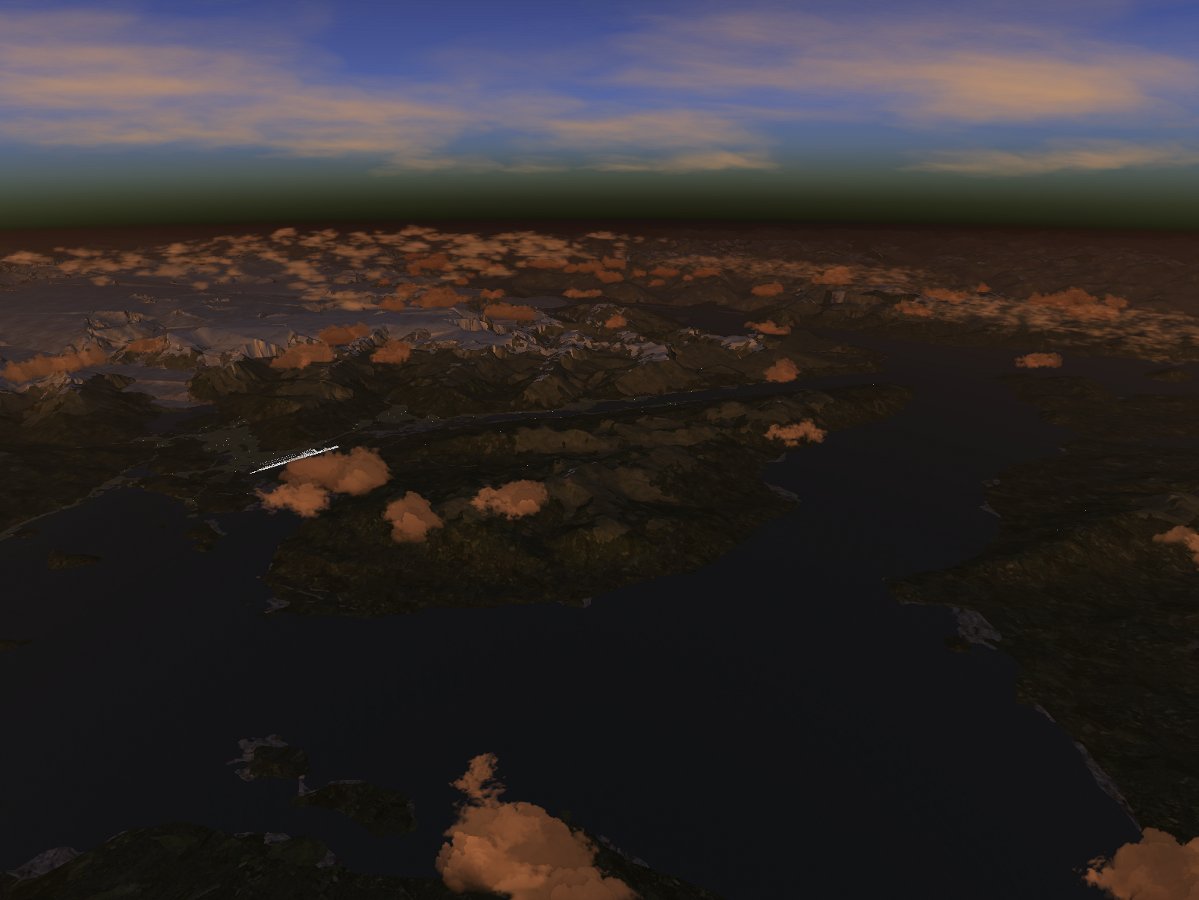
Let’s follow the development of convective clouds during a day in Juneau (Alaska). At sunrise, only very few clouds form, and they are transient, whispy phenomena (click to enlarge images):

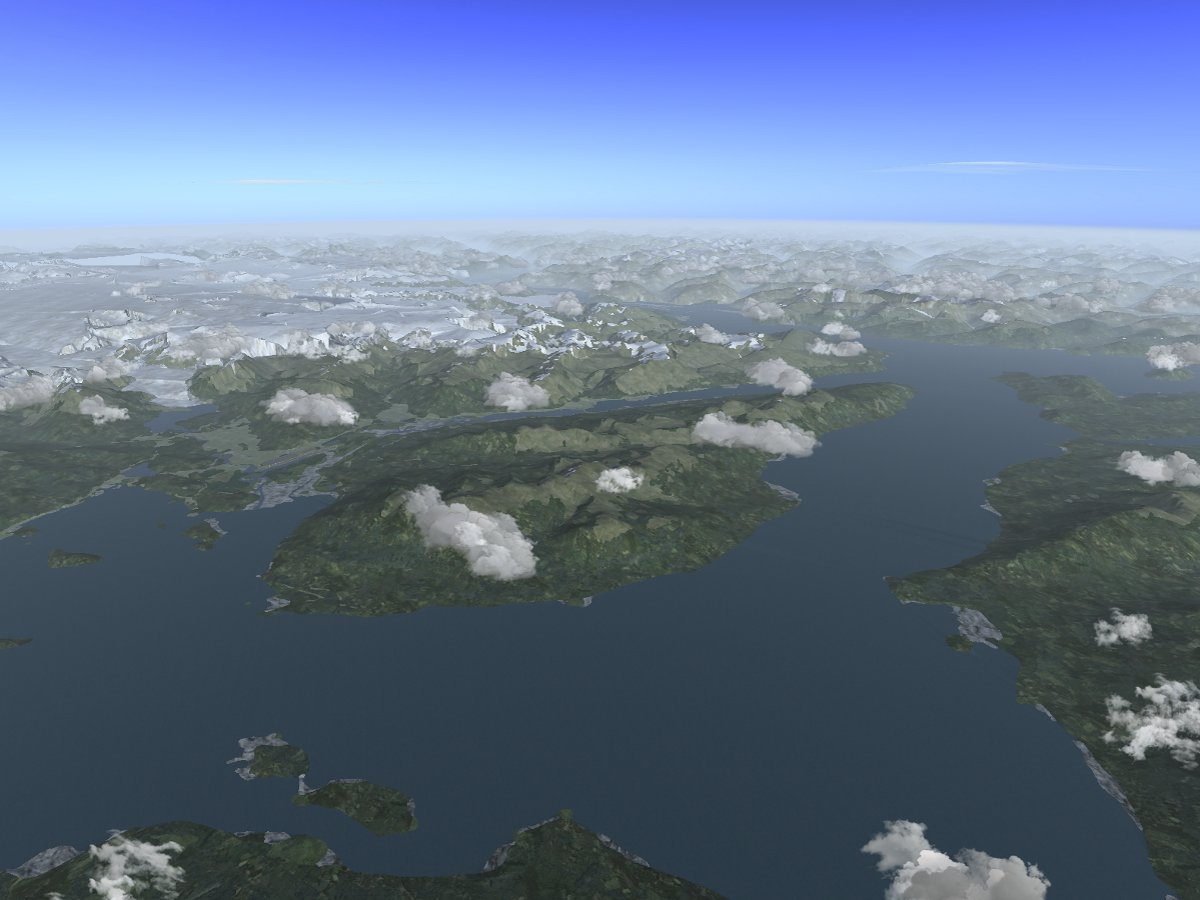
Later in the day, the cloud formation is somewhat stronger. Note how clouds tend to form over mountain peaks, but do not form over open water. Also, no strong cloud development occurs over Taku glacier in the upper left, despite its high altitude, as the ice surface does not heat well in the sun.
At noon, the thermal updrafts become stronger and consequently the clouds become more well-defined. While in the morning the upward motion of air rarely exceeds 0.5 m/s, around noon this becomes rather 1 m/s, to strengthen even more in the afternoon.
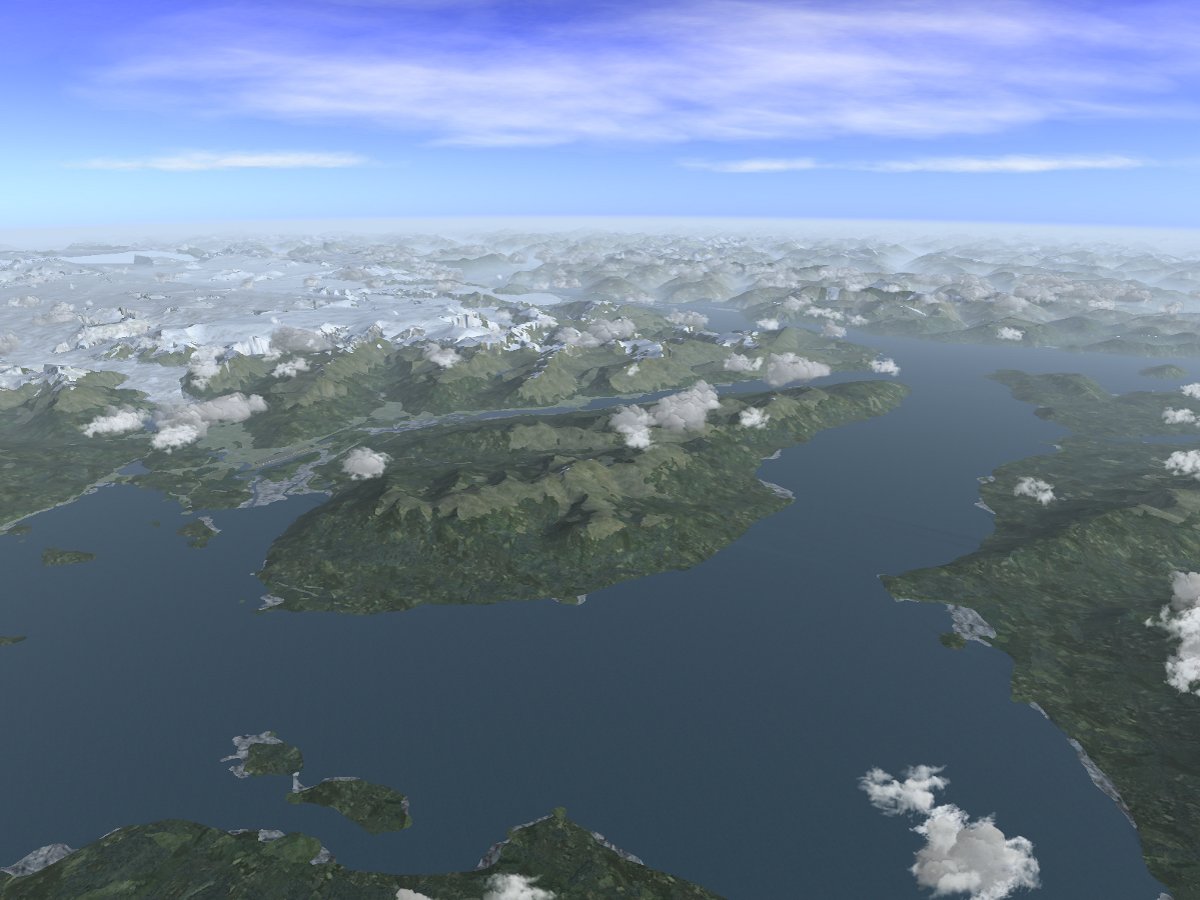
Yet a few hours later, the number of clouds decreases again as the thermal irradiation by the sun weakens, but then typically fewer but stronger thermals with larger cap clouds are found.
Towards sunset, there is still significant thermal energy left to lead to sizeable cloud development, although the number of clouds as well as the typical strength of thermals is decreasing again. During the night, the development of convective clouds breaks more or less down completely as there is no thermal energy from the sun available.
Interaction of convective clouds, wind and the terrain
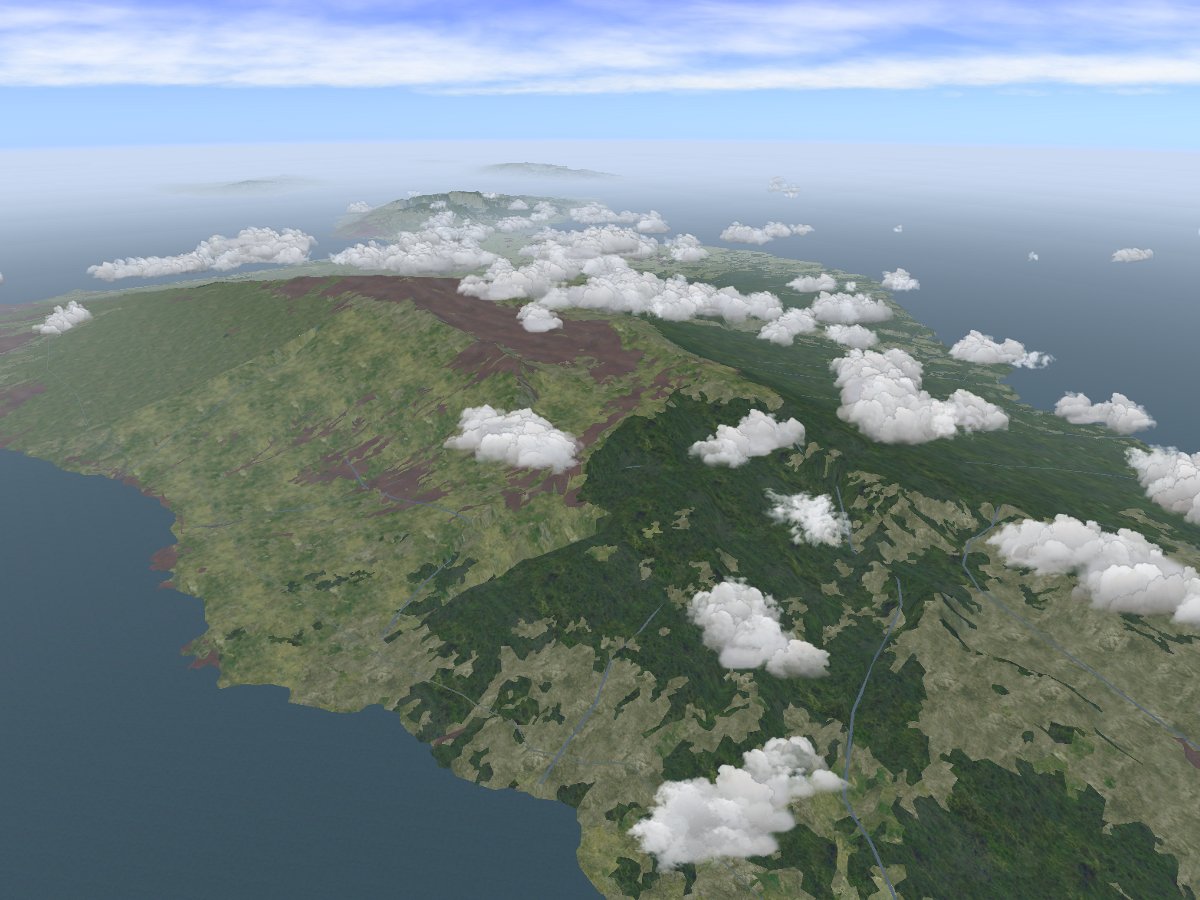
Wind meeting a terrain barrier corresponds to an upward-moving airflow, and hence is able to alter the development pattern of convective clouds in an essential way. Consider the following scene above Maui (Hawaii) in the absence of winds. Clouds rim the peak of Haleakala, but do not actually reach all the way up to the mountaintop (note also that due to the different latitude of Hawaii, there is far more thermal energy coming from the sun than in Juneau, leading to a much higher overall density of clouds):
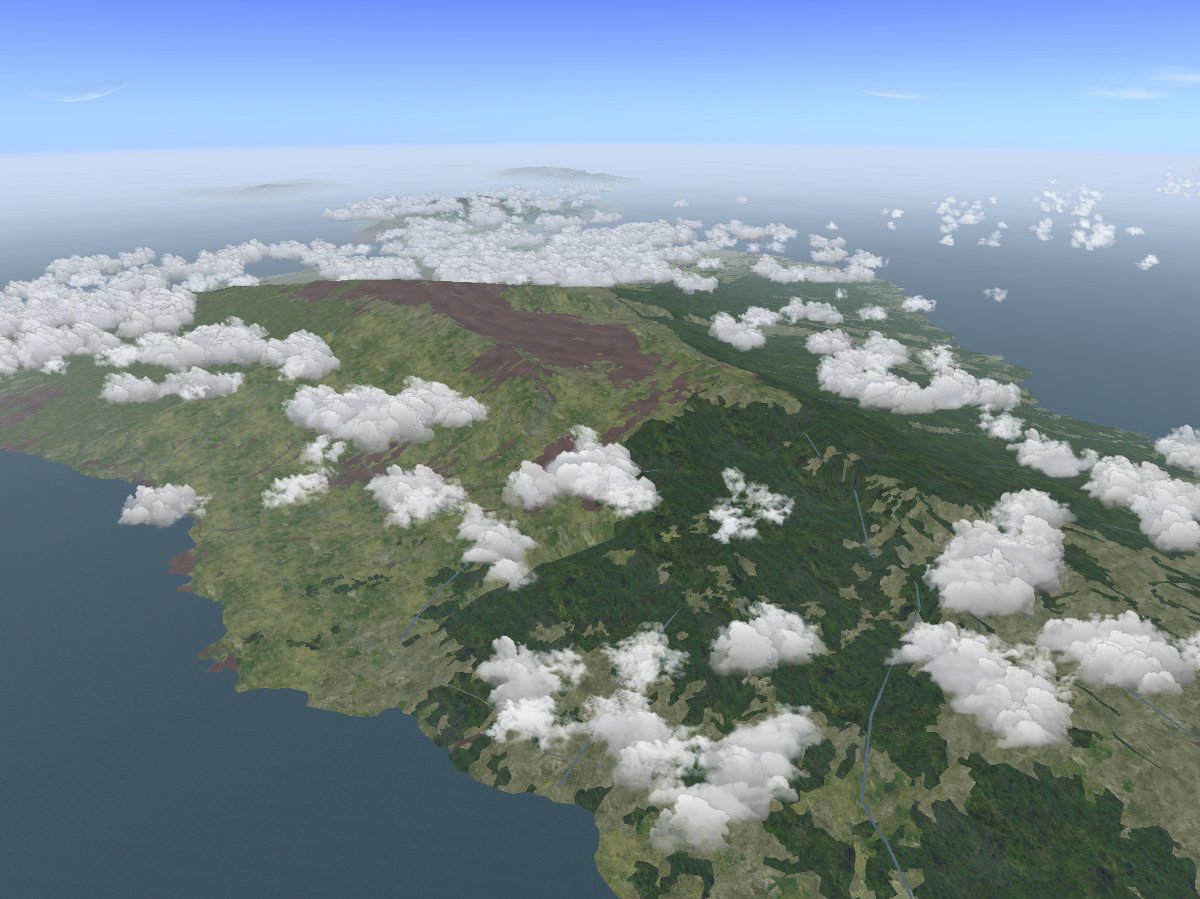
With 20 kt winds coming from the north, the picture changes quite drastically: clouds are now pushed up all the way to the summit of Haleakala by the rising air, whereas the falling air south of the crater creates a lee effect in which convective clouds disappear. The vegetation pattern of Maui reflects these prevaling conditions – while moist air is carried up all the way to the summit of Haleakala, it rains off and irrigates the northern slopes of the mountain, leading to a bright green forest belt. The southern slopes on the other hand see typically falling air and dissolving clouds, and are consequently much drier.
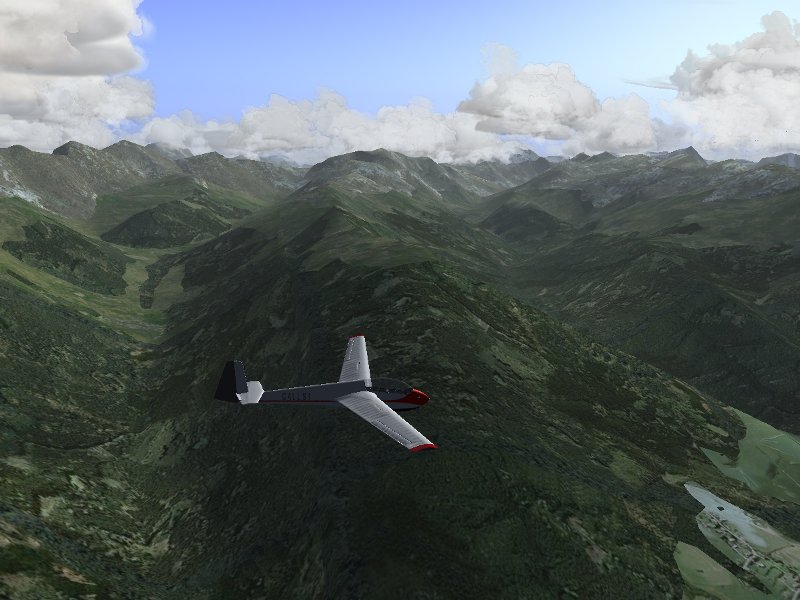
Convective clouds in flight
If the appropriate option is selected, thermals are automatically generated along with Cumulus clouds so that thermal soaring is possible. Combined with the effect of ridge lift, this can make for rather realistic mountain soaring conditions in which a good degree of skill is required to stay in the air.
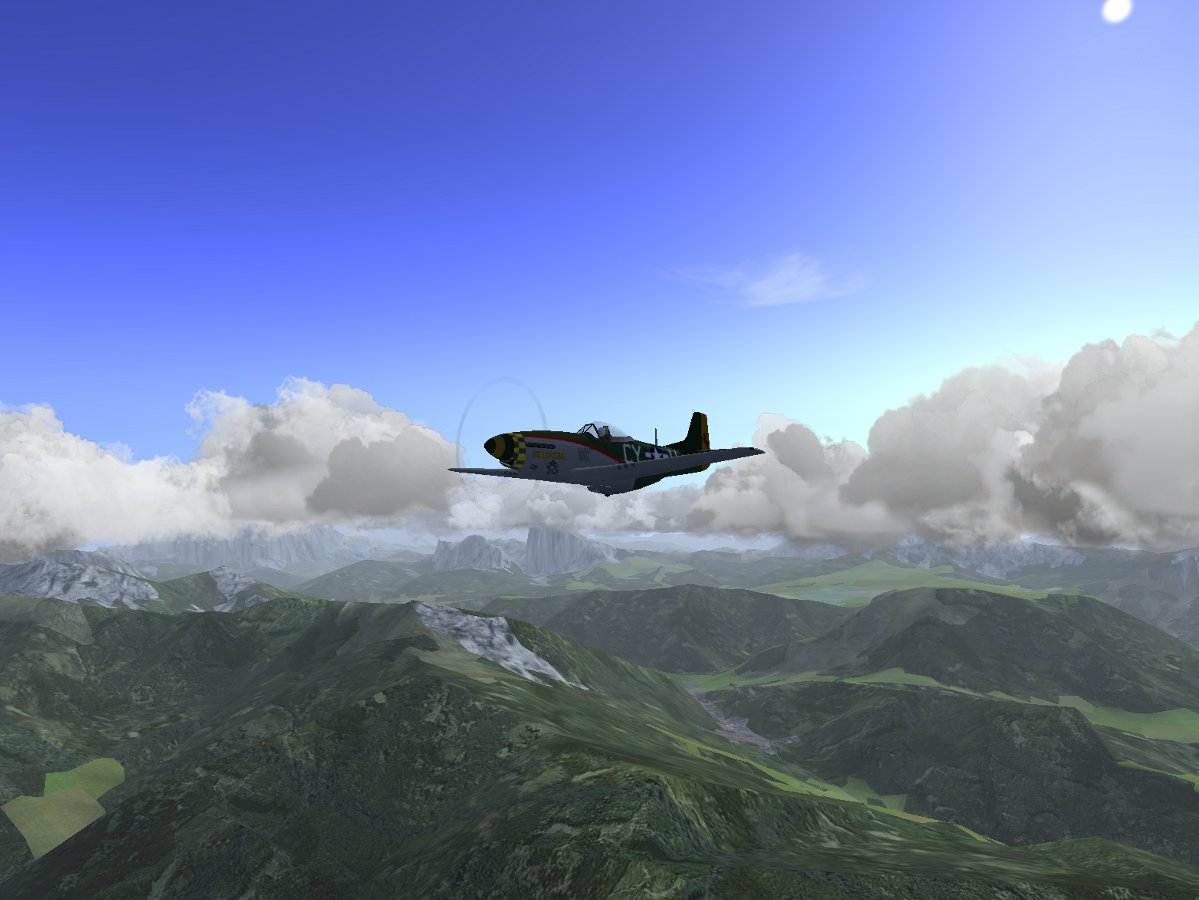
But the detailed interplay between convection and the terrain leads to interesting scenes also in other planes. Around noon, the peaks of high mountains are often covered in rather dramatic clouds piling up against the slopes.

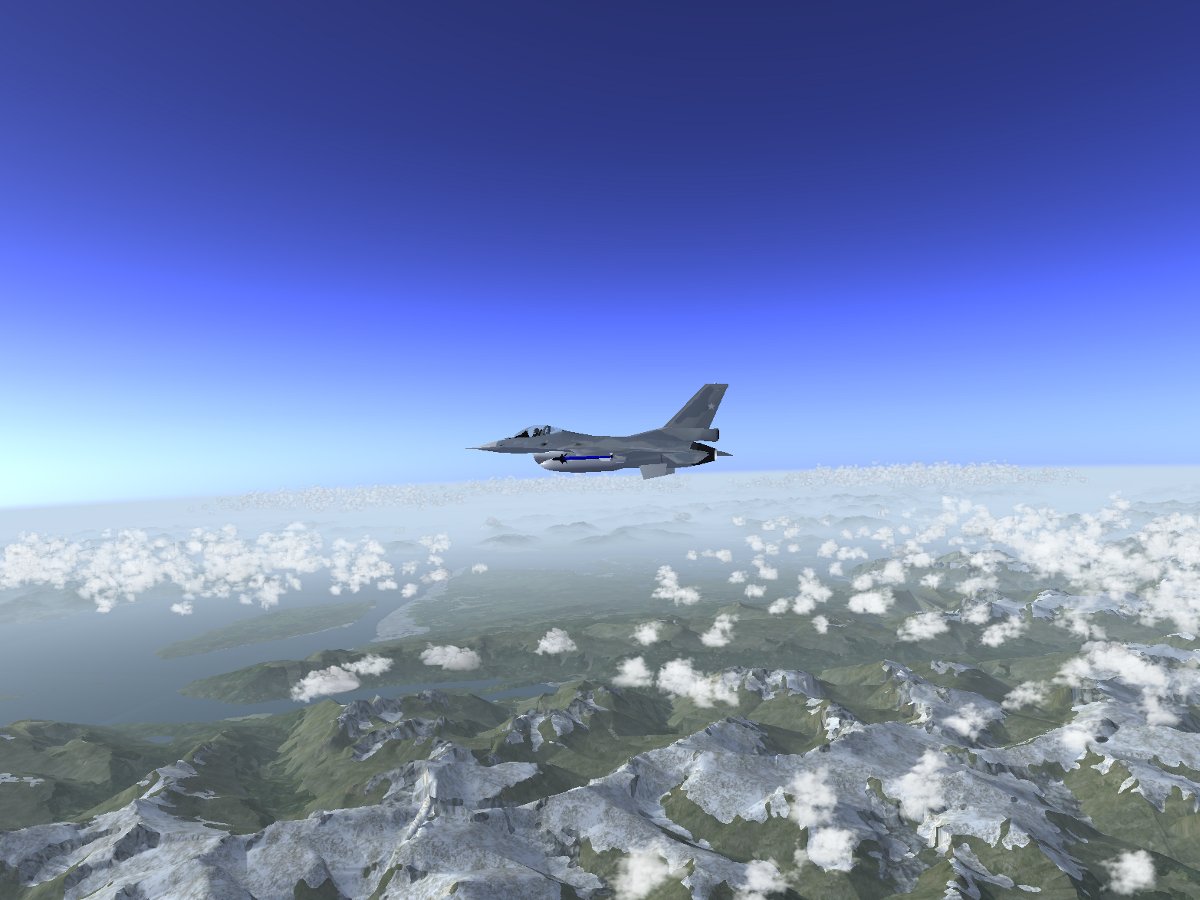
Further down, the altitude of the cloudbase is no longer determined by the terrain but by the air layers.
And yet, the terrain elevation and the change between land and water imprint a pronounced pattern onto the distribution of density, shape and size of convective clouds.

Convection may also occur due to vertical instabilities in upper air layers, leading to the development of Altocumulus clouds, or at even higher altitudes Cirrocumulus clouds. Here’s an example of the development of Altocumulus fields at 15.000 ft. At such high altitudes, the clouds are no longer influenced by the terrain underneath, but rather by the properties of the air layers between which the Altocumuli form. For instance, Altocumulus development may be caused by the instabilities associated with an approaching cold front, and may thus signal the danger of severe thunderstorms in the near future. The Advanced Weather offline weather generation automatically includes this and other rules of large-scale weather patterns.
Next: Layered clouds, haze, fog and precipitation